Việc cài đặt đúng các tham số Servo Delta là yếu tố then chốt đảm bảo hiệu suất hoạt động ổn định cho động cơ. Để giúp quý khách hàng dễ dàng tiếp cận và sử dụng thiết bị hiệu quả, HDE xin tổng hợp hướng dẫn chi tiết các nhóm tham số cài đặt servo Delta phổ biến nhất kèm theo ý nghĩa, ứng dụng thực tế, giá trị mặc định.

Sơ đồ đầu nối
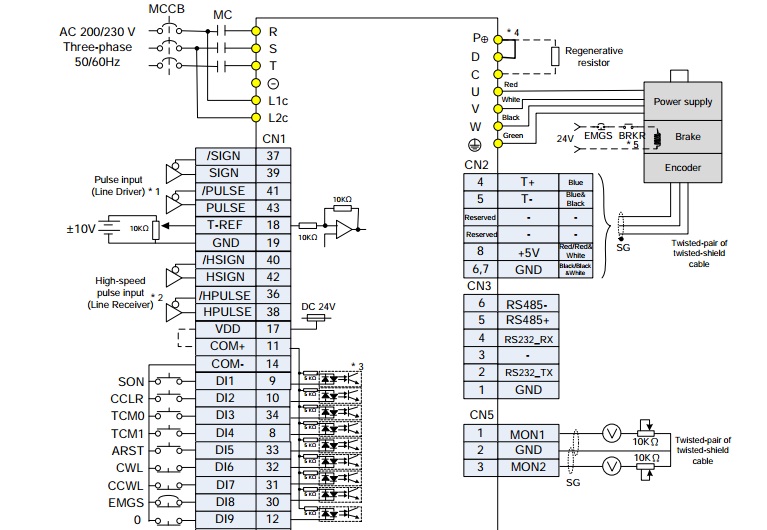
Sơ đồ dây tín hiệu I/O (CN1).

Bảng tham số cơ bản – Hướng dẫn cài đặt Servo Delta
| Tham số | Chức năng | Ý nghĩa cài đặt | Giá trị mặc định |
|---|---|---|---|
| P0-02 | STS: Tình trạng Driver | 00: Số xung phản hồi của động cơ (sau khi điều chỉnh tỉ số truyền) 01: Số xung đầu vào của lệnh xung 02: Độ lệch giữa lệnh điều khiển và phản hồi xung 03: Số lượng xung phản hồi động cơ (mã hóa) 04: Số xung đầu vào trước khi mở rộng tỉ lệ 05–10: Giá trị vận hành như tốc độ, mô-men xoắn, điện áp… 112: Chất lượng giao tiếp | 00 |
| P1-01 | CTL: Chế độ điều khiển | 00: Vị trí (PT) 01: Phát xung nội (PR) 02: Điều khiển tốc độ 03: Điều khiển mô-men | 0 |
| P1-02 | PSTL: Cài đặt giới hạn tốc độ và mô-men | 00: Tắt cả 2 giới hạn 01: Giới hạn S bật, T tắt 10: Giới hạn S tắt, T bật 11: Cả hai đều bật | 00 |
| P1-36 | TSL: Thời gian tăng/giảm tốc (ms) | Dải cài đặt: 0 – 10.000 | – |
| P1-37 | GDR: Tỉ lệ quán tính (J_Load/J_Motor) | Dải cài đặt: 0.0 – 200.0 | 1.0 |
| P1-38 | ZSPD: Cài đặt dải tốc độ zero | Dải cài đặt: 0.0 – 200.0 | 10 |
| P1-44/45 | Tỷ lệ bánh răng GR1/GR2 | Dùng để hiệu chỉnh tỉ số truyền với servo | GR1: 16, GR2: 10 |
| P1-51 | RES1: Giá trị điện trở hãm (Ohm) | Dải: 10 – 750 | – |
| P1-52 | RES2: Công suất điện trở hãm (W) | Dải: 30 – 3000 | – |
| P1-56 | OVW: Mức cảnh báo quá tải đầu ra (%) | Nếu quá giới hạn này, sẽ báo lỗi đầu ra | 120 |
| P1-57 | CRSH: Bảo vệ va chạm động cơ (%) | Dải: 0 – 300, 0 là vô hiệu | 0 |
| P1-58 | CRSHT: Thời gian bảo vệ va chạm (ms) | Dải: 0 – 1000 | 1 |
| P2-00 | KPP: Tăng vòng lặp vị trí (rad/s) | Dải cài đặt: 0 – 2047 | 35 |
| P2-01 | PPR: Tỷ lệ chuyển đổi vòng lặp vị trí (%) | Dải: 10 – 500 | 100 |
| P2-02 | PFG: Mức tăng chuyển tiếp dữ liệu vị trí (%) | Dải: 0 – 100 | 50 |
| P2-03 | PFF: Hằng số nguồn cấp dữ liệu vị trí (ms) | Dải: 2 – 100 | 5 |
| P2-04 | KVP: Tăng tốc độ vòng lặp (rad/s) | Dải: 0 – 8191 | 500 |
| P2-05 | SPR: Tăng tốc độ vòng lặp (%) | Dải: 10 – 500 | 100 |
| P2-06 | KVI: Tích phân tốc độ (rad/s) | Dải: 0 – 1023 | 0 |
| P2-07 | KVF: Tăng tốc độ tiến lên (%) | Dải: 0 – 100 | 0 |
| P2-08 | PCTL: Reset tham số đặc biệt | Reset mặc định | 0 |
| P2-10 – P2-13 | DI1–DI4: Đầu vào điều khiển | Các trạng thái NO/NC từ 100 – 117 tùy chân | 101–117 |
| P2-34 | SDEV: Cảnh báo quá tốc độ | Dải: 1 – 6000 | 5000 |
| P2-35 | PDEV: Cảnh báo độ lệch vị trí (pulse) | Dải: 1 – 1.600.000 | 480000 |
| P2-65 | Nhóm bảo vệ đặc biệt | Bảo vệ IGBT, mất pha, lỗi encoder… | 0000 |
| P4-05 | JOG: Tốc độ chạy JOG (r/min) | Dải: 0 – 5000 | 20 |
Ghi chú:
-
Các giá trị cần thay đổi tùy vào ứng dụng cụ thể và thông số kỹ thuật động cơ.
-
Trước khi thay đổi, nên ghi lại các giá trị cũ để khôi phục nếu cần.
-
Sau khi cài đặt, nên tắt nguồn và khởi động lại servo để đảm bảo nhận thông số.
Các chế độ cài đặt thường gặp
1. Hướng dẫn cài đặt chạy JOG cho servo Delta
| Bước | Nội dung |
|---|---|
| Bước 1 | Kết nối đầy đủ dây nguồn: động lực, điều khiển, cáp nguồn cho động cơ, cáp encoder, cáp I/O. Đảm bảo đúng chuẩn, không lộn thứ tự, không lỏng lẻo hay tiếp xúc kém. |
| Bước 2 | Khi bật nguồn, nếu driver báo lỗi AL013 (Cảnh báo dừng khẩn EMG), cài đặt các thông số sau để loại bỏ lỗi:
– P2-15 = 122 (mặc định 22) – P2-16 = 123 (mặc định 23) – P2-17 = 121 (mặc định 21) Sau khi cài đặt, tắt nguồn và bật lại. Màn hình driver hiển thị “0000”. |
| Bước 3 | Cài đặt ON servo bằng tham số:
– P2-10 = 001 (mặc định là 101) |
| Bước 4 | Cài tốc độ chạy JOG tại:
– P4-05 = (giá trị mong muốn, đơn vị r/min) Sau đó nhấn nút SET, màn hình servo sẽ hiển thị: -JOG-. |
| Bước 5 | Nhấn phím ▲ hoặc ▼ để điều khiển motor servo JOG thuận hoặc ngược theo tốc độ đã cài đặt.
Chú ý: Muốn thay đổi tốc độ JOG, quay lại bước 4 và nhập giá trị mới. |
2. Hướng dẫn cài đặt servo delta chế độ speed mode
Lưu ý:
Trước khi cài đặt và chạy, cần cố định chắc chắn động cơ để tránh sự cố khi chạy thử.
Bước 1: Cài đặt chế độ tốc độ
-
Đặt thông số: P1-01 = 2 (Chế độ Speed)
-
Sau đó tắt và bật lại nguồn cho driver.
Bước 2: Cài đặt các chân tín hiệu số (DI)
| Đầu vào số (DI) | Giá trị tham số (P2-xx) | Biểu tượng | Chức năng | Thứ tự chân CN1 |
|---|---|---|---|---|
| DI1 | P2-10 = 101 | SON | Servo ON | Chân 9 |
| DI2 | P2-11 = 109 | TRQLM | Giới hạn moment | Chân 10 |
| DI3 | P2-12 = 103 | SPDO | Lệnh lựa chọn tốc độ 0 | Chân 34 |
| DI4 | P2-13 = 104 | SPD1 | Lệnh lựa chọn tốc độ 1 | Chân 8 |
| DI5 | P2-14 = 102 | ARST | Reset cảnh báo | Chân 33 |
| DI6 | P2-15 = 0 | Disabled | Không dùng | — |
| DI7 | P2-16 = 0 | Disabled | Không dùng | — |
| DI8 | P2-17 = 0 | Disabled | Không dùng | — |
| DI9 | P2-36 = 0 | Disabled | Không dùng | — |
-
Đã loại bỏ các chế độ: Giới hạn âm (DI6), giới hạn dương (DI7) và chế độ dừng khẩn cấp (DI8).
-
Sau khi hoàn tất cài đặt, bắt buộc tắt và bật lại nguồn hoặc chuyển DI5 (ARST) từ OFF → ON để servo nhận thông số mới.
Chọn lệnh tốc độ (SPDO / SPD1)
| Lệnh tốc độ | Tín hiệu DI (CN1) | Nguồn lệnh | Nội dung | Dải tốc độ (v/p) |
|---|---|---|---|---|
| S1 | SPD1 = 0 SPDO = 0 |
Lệnh bên ngoài | Điều khiển bằng điện áp VREF–GND | -10V ~ +10V |
| S2 | SPD1 = 0 SPDO = 1 |
Tham số tốc độ | Giá trị trong P1-09 | -50000 ~ +50000 |
| S3 | SPD1 = 1 SPDO = 0 |
Tham số tốc độ | Giá trị trong P1-10 | -50000 ~ +50000 |
| S4 | SPD1 = 1 SPDO = 1 |
Tham số tốc độ | Giá trị trong P1-11 | -50000 ~ +50000 |
Tốc độ cài đặt (v/p) = Giá trị cài đặt × 0.1
Ví dụ:
-
P1-09 = +30000 → Tốc độ = 30000 × 0.1 = +3000 v/p
-
P1-10 = +1000 → Tốc độ = 1000 × 0.1 = +100 v/p
-
P1-11 = -30000 → Tốc độ = -30000 × 0.1 = -3000 v/p
Bước 3: Vận hành thử nghiệm
-
ON tín hiệu DI1 (SON) để servo hoạt động.
-
Tùy vào trạng thái của DI3 (SPDO) và DI4 (SPD1), tốc độ hoạt động như sau:
| Trạng thái DI3 (SPDO) | Trạng thái DI4 (SPD1) | Tốc độ hoạt động |
|---|---|---|
| OFF | OFF | Quay theo điện áp đầu vào (VREF) |
| ON | OFF | +3000 v/p (P1-09) |
| OFF | ON | +100 v/p (P1-10) |
| ON | ON | -3000 v/p (P1-11) |
Kết luận

Website cùng hệ thống : https://inovancevietnam.vn/
Facebook: Công Ty CP Điện Hải Dương – HDE
Youtube: HDE Tech
Tiktok: HDE Tech










